集团公司官网")


 浏览器自带分享功能也很好用哦~
浏览器自带分享功能也很好用哦~适用标准
JB/T7334《手拉葫芦》
产品介绍
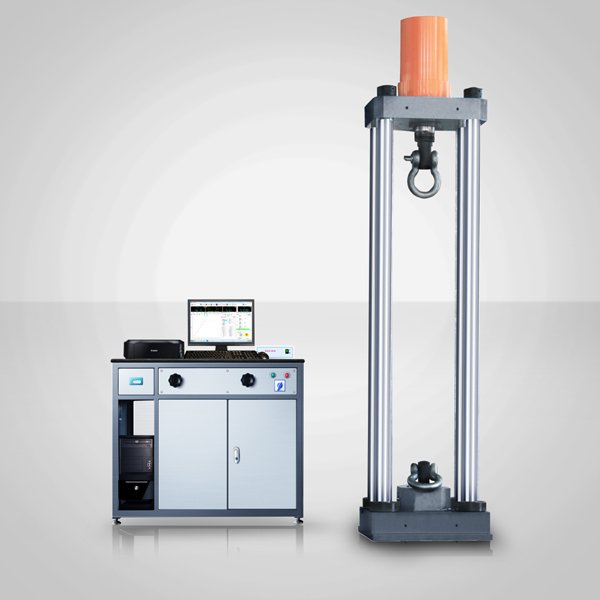
LAW-1000型微机控制电液伺服手拉葫芦试验机主要用于对手拉葫芦进行力学性能检定,由宽调速范围的电液伺服阀与计算机及测控单元所组成伺服控制系统,能精确地控制和测量试验全过程。整机由主机、伺服液压源、计算机测控系统等部分组成。
进行拉向在伺服控制条件下精确试验:并按照标定点0.5吨、1吨、2吨、3吨、5吨、10吨、20吨进行手拉葫芦的负荷的1.25倍、4倍设定控制参数,完成对0.5-20吨手拉葫芦所进行拉向力学性能特征的测试和检定。
具有试验力、位移两个控制通道及与之相对应的试验力、应力、位移等多种控制方式,控制方式间可随机/随意切换;PID控制参数可在线调整。
可进行等速率试验力、等速率应力、等速率位移试验和恒试验力、恒应力、恒位移试验。
可按照设定加载方式完成多种波形的低周循环测试。
自动采集、处理、显示和存储检测数据,可随时查阅以前的检定数据。自动测试被测手拉葫芦的各种特征值。
自动绘制力-位移、力-时间、位移-时间等多种试验曲线,自动编辑实验报告并适时打印输出
拥有功能强大的数据库和多种接口格式供用户选择,帮助用户实现局域网络通讯。
具有原始试验参数输入功能;具有压力、活塞限位、安全防护等多种保护措施;具有自动和手动两种控制方式。
主机采用油缸上置、四立柱式框架结构,上、下拉环间所构成的拉伸试验空间在框架下部,负荷传感器装在机座上部,与下拉头连接。主机主要由机座、四根立杠、上下拉环、油缸座、油缸活塞副、负荷传感器等所组成。本机采用单出头式双作用油缸加载方式,被测手拉葫芦的吊钩可直接挂于上下拉环之间,拉环规格及数量可根据用户试验要求配置。


适用标准
JB/T7334《手拉葫芦》
产品介绍
LAW-1000型微机控制电液伺服手拉葫芦试验机主要用于对手拉葫芦进行力学性能检定,由宽调速范围的电液伺服阀与计算机及测控单元所组成伺服控制系统,能精确地控制和测量试验全过程。整机由主机、伺服液压源、计算机测控系统等部分组成。
进行拉向在伺服控制条件下精确试验:并按照标定点0.5吨、1吨、2吨、3吨、5吨、10吨、20吨进行手拉葫芦的负荷的1.25倍、4倍设定控制参数,完成对0.5-20吨手拉葫芦所进行拉向力学性能特征的测试和检定。
具有试验力、位移两个控制通道及与之相对应的试验力、应力、位移等多种控制方式,控制方式间可随机/随意切换;PID控制参数可在线调整。
可进行等速率试验力、等速率应力、等速率位移试验和恒试验力、恒应力、恒位移试验。
可按照设定加载方式完成多种波形的低周循环测试。
自动采集、处理、显示和存储检测数据,可随时查阅以前的检定数据。自动测试被测手拉葫芦的各种特征值。
自动绘制力-位移、力-时间、位移-时间等多种试验曲线,自动编辑实验报告并适时打印输出
拥有功能强大的数据库和多种接口格式供用户选择,帮助用户实现局域网络通讯。
具有原始试验参数输入功能;具有压力、活塞限位、安全防护等多种保护措施;具有自动和手动两种控制方式。
主机采用油缸上置、四立柱式框架结构,上、下拉环间所构成的拉伸试验空间在框架下部,负荷传感器装在机座上部,与下拉头连接。主机主要由机座、四根立杠、上下拉环、油缸座、油缸活塞副、负荷传感器等所组成。本机采用单出头式双作用油缸加载方式,被测手拉葫芦的吊钩可直接挂于上下拉环之间,拉环规格及数量可根据用户试验要求配置。
取消
清空记录
历史记录
清空记录
历史记录
品牌认证
1658天
已认证
品牌认证
1658天
已认证


 765140455
765140455